$12 ESP32 Quadcopter Built Using Custom PCB Frame and Open Source Software
- Built a $12 quadcopter using ESP32, IMU sensor, and 4 MOSFETs to control motors
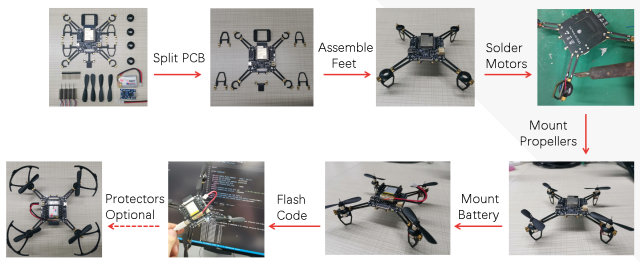
- PCB frame doubles as landing struts, so no 3D printing needed
- Expansion options available for position holding, pressure sensing, compass
- Leverages open source Crazyflie firmware with cfclient software for monitoring and control
- Control options include game controller via WiFi or mobile apps from Espressif